MIT Robotics Rover 1
Justin, MIT, 2013-16
Archive of an old project
In 2013, I cofounded the MIT Robotics Team, and led its mechanical team for 2 years. In its first year, the team entered the 2014 NASA RASCAL Robo-Ops Challenge, in which teams built tele-operated rovers capable of navigating and searching the NASA Johnson Rock Yard in Texas for specific rock samples.
As mechanical lead, I alongside two others designed, reviewed and manufactured the team's 45kg, 1m x 0.8m rover. The design of the rover took about 2 months of detailed CAD work (alongside school), and another 2 months of machining.
In our first year of competition, we placed 2nd, winning $6000, and placing behind the fourth year team from WVU. A video of mission control during our competition run can be seen here.

The rover needed to be able to negotiate a variety of terrain, including a sandpit, rockyard, and gravel inclines. To deal with this, we decided to implement a passive averaging system, similar in intention to the Mars Rovers' rocker bogie systems. We designed a four wheel system that utilised heim joints and a central pivot bar that averages the height of the four wheels to keep the chassis as stable as possible.
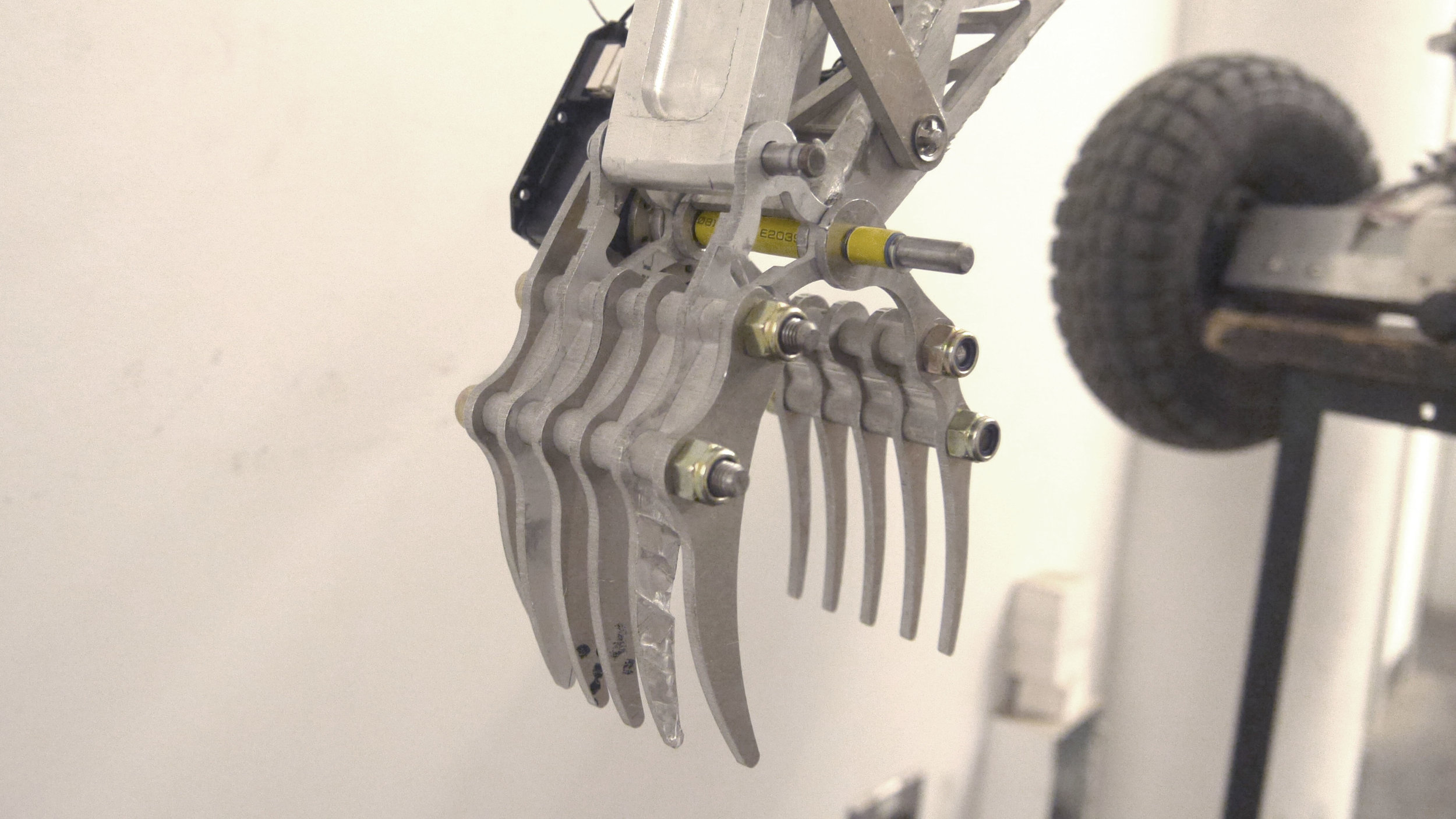
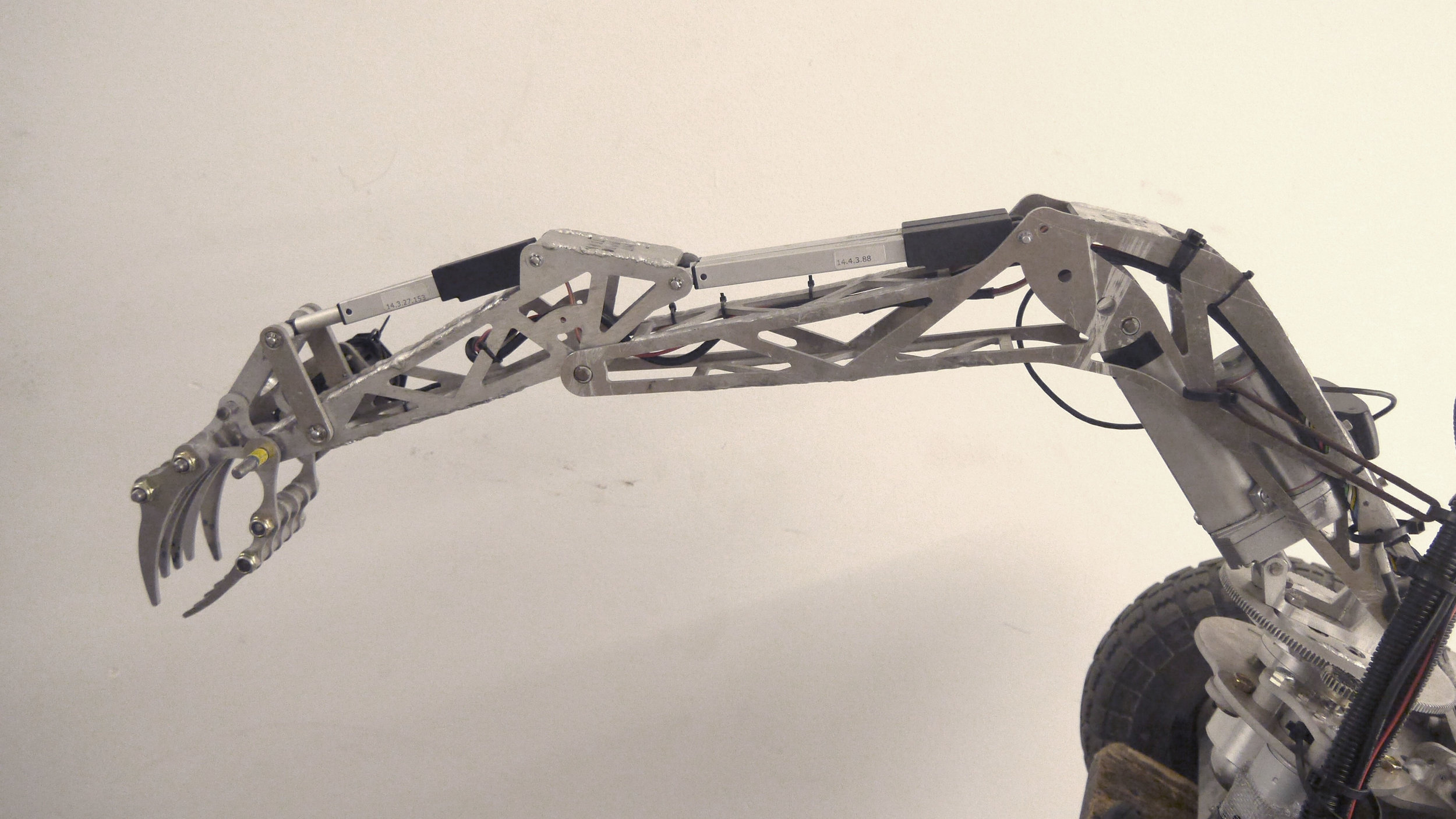
The boom, stick and claw were all waterjetted and welded aluminium.
I was in charge of the design of the arm. To make controls intuitive, we chose an excavator style arm with 5 DOF. It was actuated by electric linear actuators to replace traditionally hydraulic actuators, an expensive metal-geared servo for the thumb/claw, and a (not very good) DC Pololu motor for rotation. The actuator and structure was strong enough that we could dig the claw into the ground and lift the entire rover into the air!
I alon with some teammates machined the entire project in house.